This is the INTENTION project blog!
INTENTION is an acronym for:
learnINg versaTile lEgged locomotioN wiTh actIve perceptiON
Our objective is to develop quadruped robots that can perceive and perform agile locomotion in unstructured, confined, and dynamic environments, switch between different modes of locomotion, and improve performance over time.
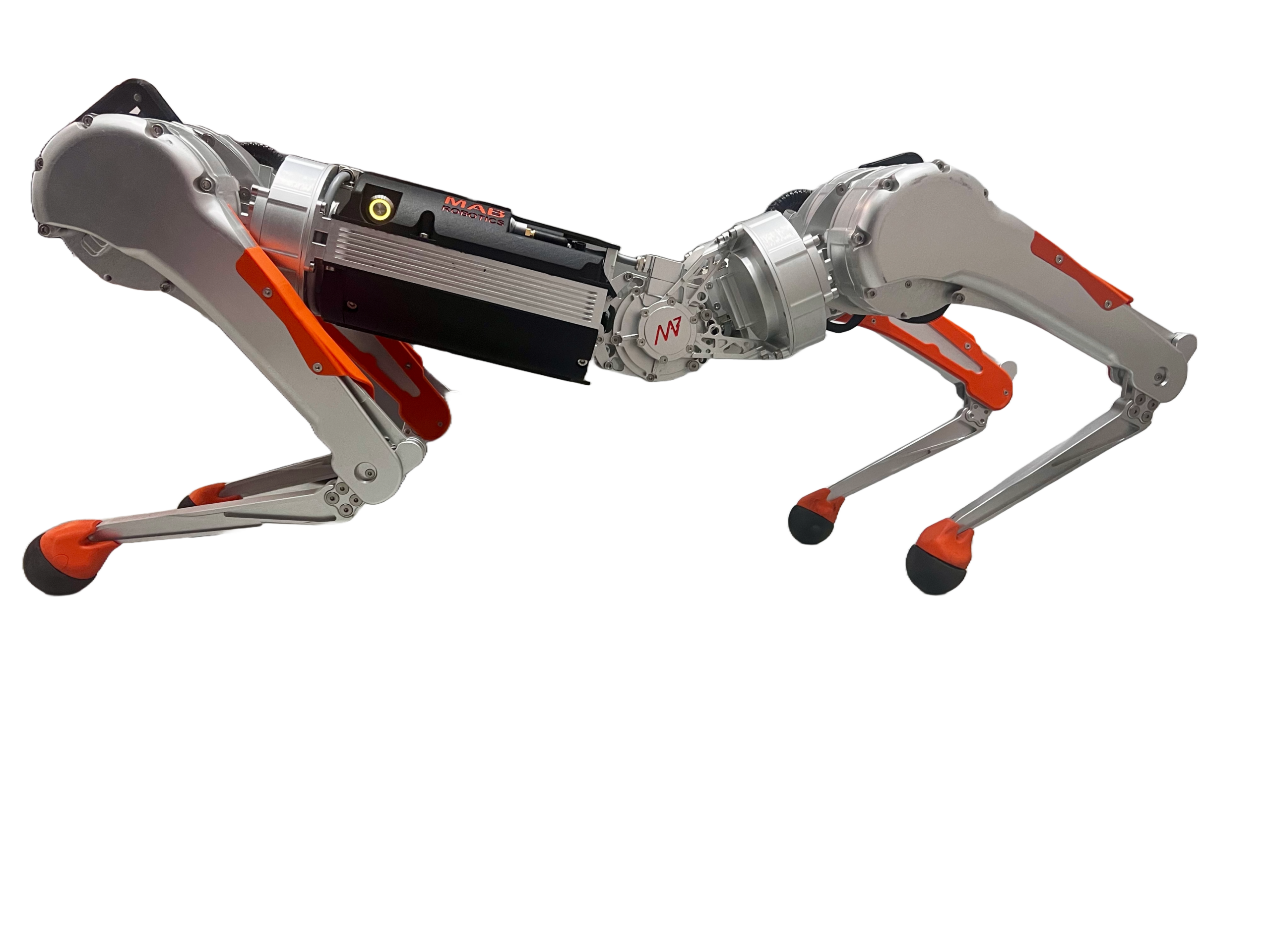
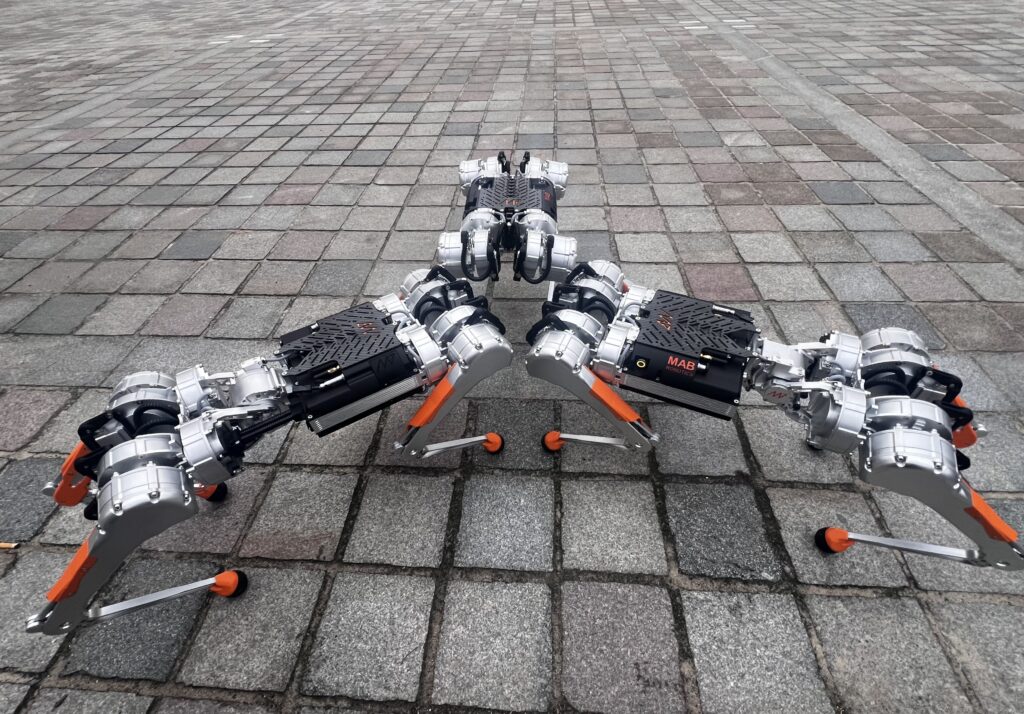
We want to investigate, in particular, how to control different robot embodiments, such as quadruped robots with flexible spines. For this reason, we have a custom-made robot, the MAB Silver Badger from MAB Robotics:
INTENTION is an NCN-DFG Collaborative grant, under the WEAVE program.