-
48 Hours at the ETH Robotics Club Hangar: HACK2026

This past weekend, I had the pleasure of participating in HACK2026, hosted by the ETH Robotics Club. It was an intense, high-energy 48 hours in the Hangar, surrounded by some of the brightest minds in robotics. I attended the event as the representative of INTENTION project. It was an incredible opportunity to step out of…
-
Robust Localization, Mapping, and Navigation for Quadruped Robots
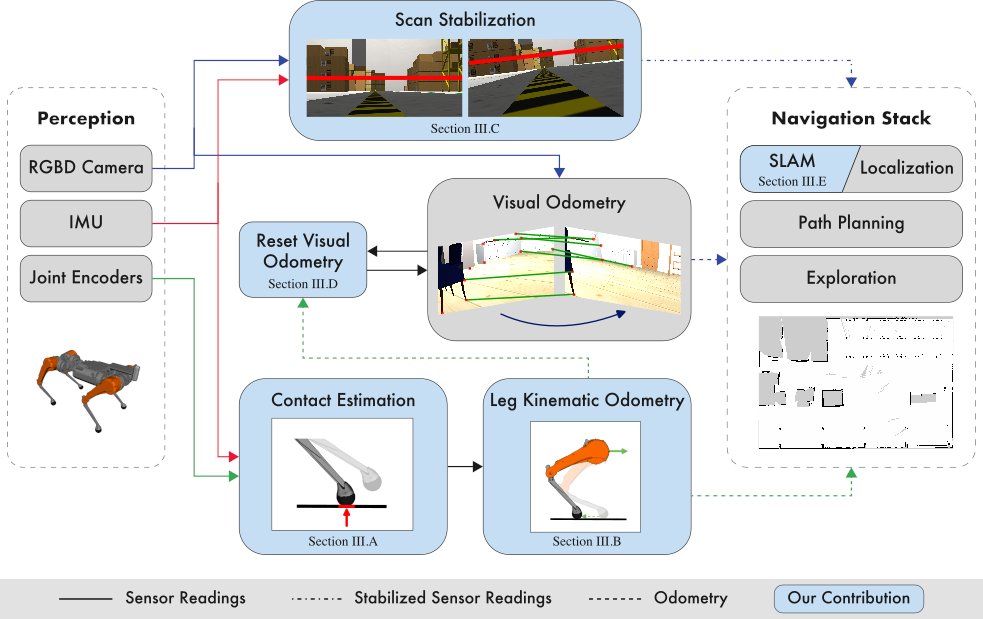
Navigation is challenging for quadruped robots. This is even more problematic when using small robots, where we have to mount cheap sensors due to payload and cost reasons. The problem gets even more challenging if we are using policies learned with Reinforcement Learning: these policies are robust, but may cause jerky movements, causing localization loss.…
-
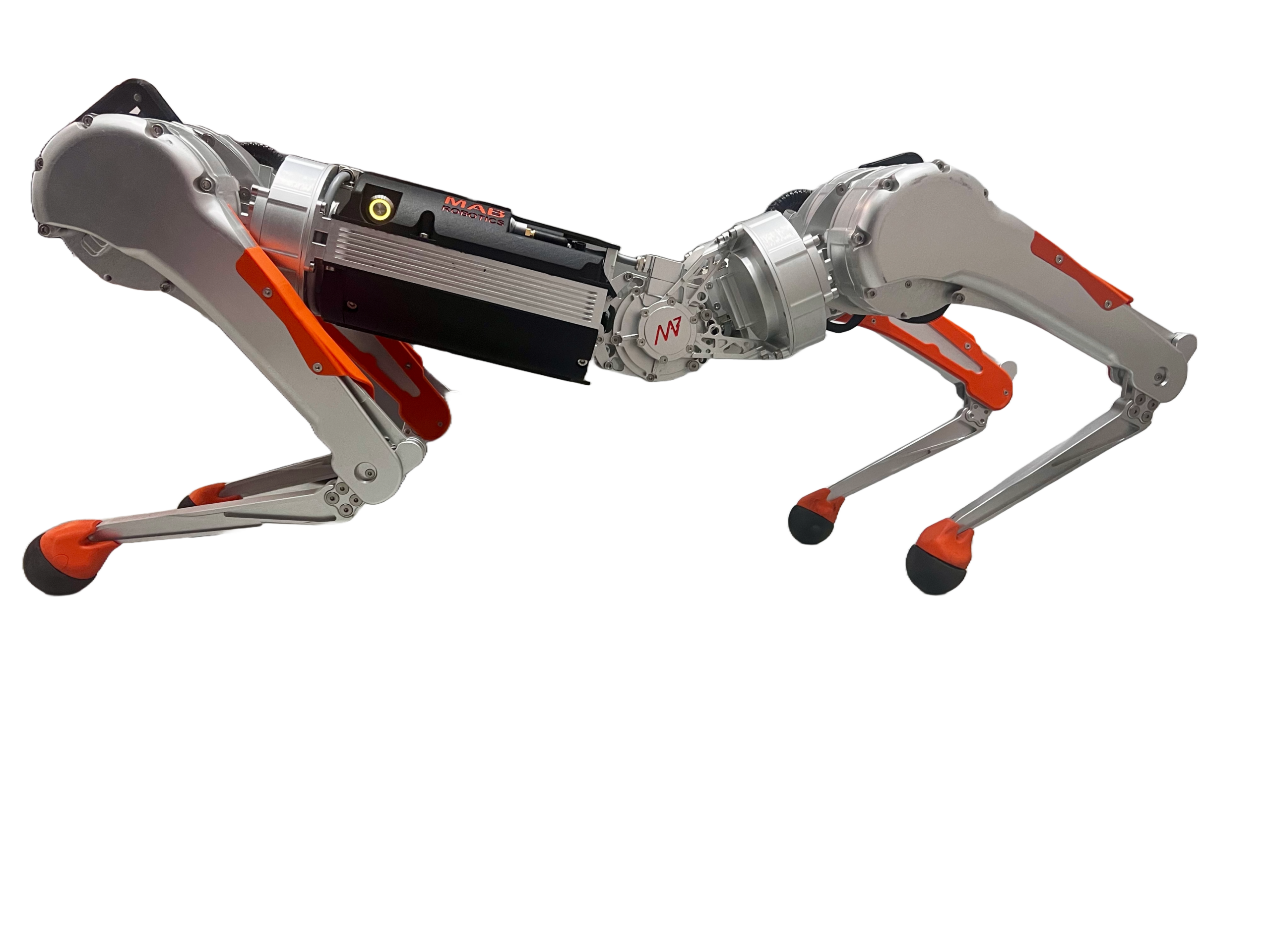
We took our quadruped robot into an ice cave❄️🐾
This Autumn the team from Poznan University of Technology had an amazing opportunity to test the locomotion capabilities of our MAB Robotics Silver Badger in challenging conditions. Thanks to the group of geologists from Adam Mickiewicz University in Poznan, led by prof. Witold Szczuciński, we were able to explore one of the largest ice caves…
-
One Policy to Run Them All: an End-to-end LearningApproach to Multi-Embodiment Locomotion
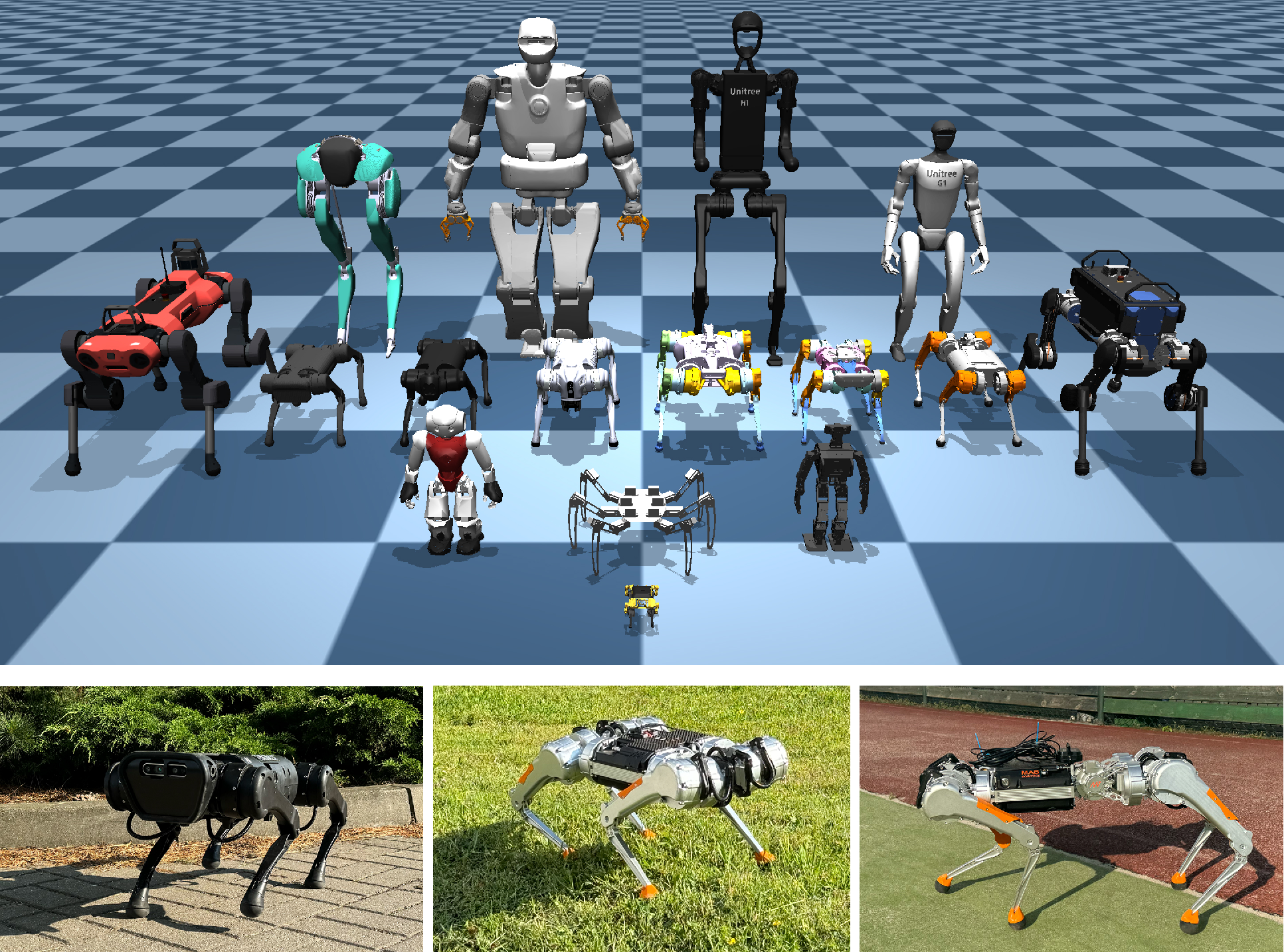
Do you need a new locomotion policy for every new robot? No! We can train a single general locomotion policy for any legged robot embodiment and morphology! Unified Robot Morphology Architecture Our Unified Robot Morphology Architecture can handle any robot morphology. To achieve this, we design our network using three main components: The URMA encoder…
-
Hello world!
This is the INTENTION project blog! INTENTION is an acronym for: learnINg versaTile lEgged locomotioN wiTh actIve perceptiON Our objective is to develop quadruped robots that can perceive and perform agile locomotion in unstructured, confined, and dynamic environments, switch between different modes of locomotion, and improve performance over time. We want to investigate, in particular,…